
針對大田環境作物全生育期多模態表型采集的自走式作物表型機器人研究
分享華中農業大學作物表型團隊在Plant Phenomics發表的一篇題為《PhenoRob-F : An autonomous ground-based robot for high-throughput phenotyping of field crops》的研究論文。團隊宋鵬副教授、楊萬能教授為該論文通訊作者,博士研究生楊蒙和李正達為共同第一作者。

作物表型高通量精準鑒定是全面解析表型與基因關系、深入認知生命過程的前提,是培育突破性新品種、保障國家糧食安全的迫切需求。與固定式及無人機表型平臺相比,表型機器人具有移動靈活作業不受時空限制、可擴展掛載多類型傳感器、近地采集數據分辨率高等優勢,是未來高通量表型檢測的重要方向之一。
針對大田環境作物全生育期、多模態表型無人化高效采集及解析需求,華中農業大學作物表型團隊研制了一款跨行行駛、自主作業的作物表型機器人系統(PhenoRob-F),該機器人主要由田間自主移動平臺和表型采集模塊組成。其中,自主移動平臺采用四輪獨立驅動獨立轉向設計方式,純電驅動,通過視覺信息和衛星導航融合,實現田間環境作物生長過程自主導航行駛。表型采集模塊搭載高光譜相機、RGB-D相機在內的多類傳感器,結合所開發的表型數據采集軟件,可進行作物全生育期圖、型、譜等多類型表型數據同步采集。
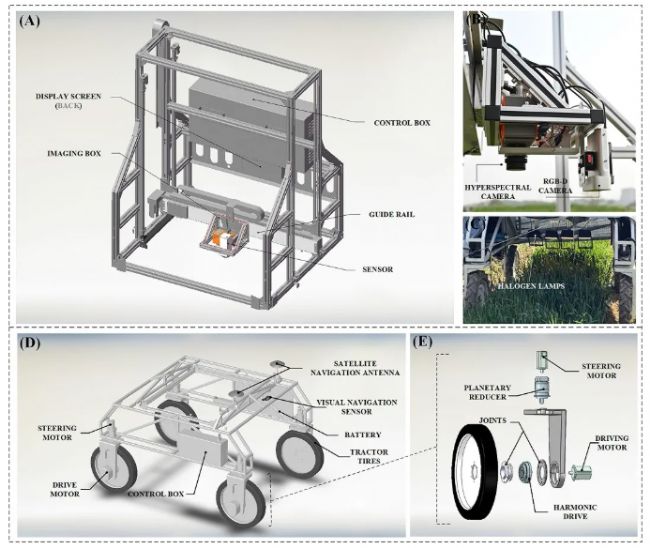 圖1 PhenoRob-F結構設計
圖1 PhenoRob-F結構設計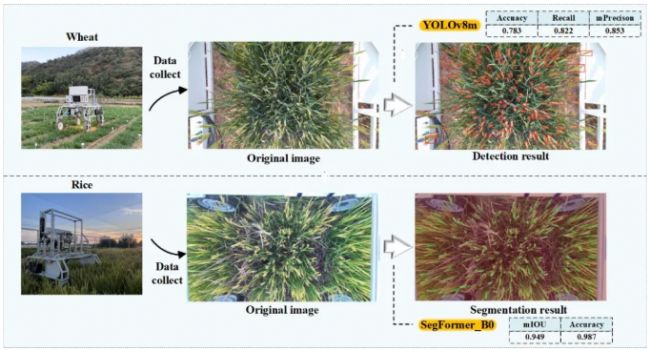 圖2 基于機器人的田間稻穗及麥穗檢測
圖2 基于機器人的田間稻穗及麥穗檢測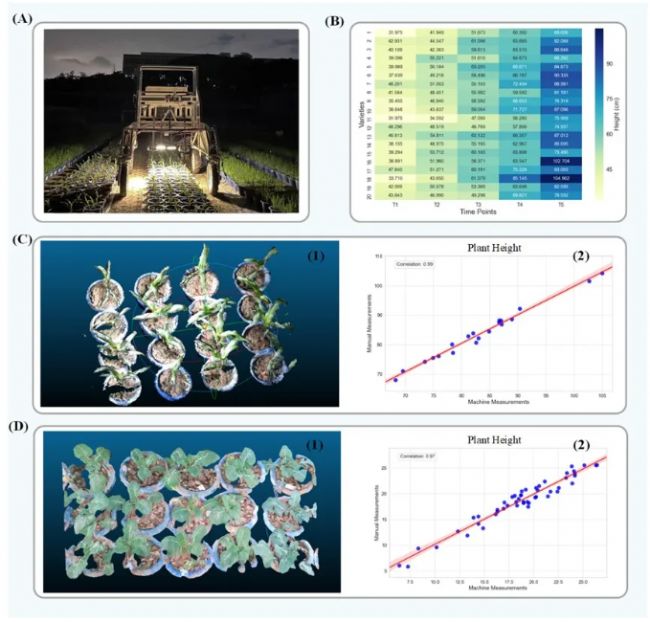 圖3 基于機器人的盆栽玉米及油菜三維表型獲取及解析
圖3 基于機器人的盆栽玉米及油菜三維表型獲取及解析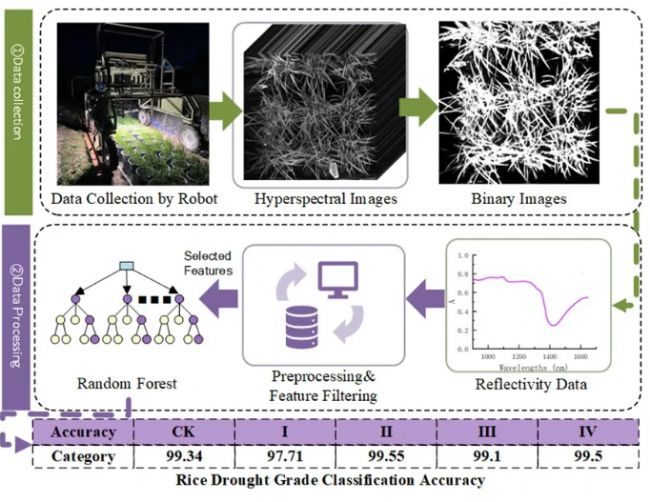 圖4 基于機器人的水稻高光譜數據獲取及分析
圖4 基于機器人的水稻高光譜數據獲取及分析此外,團隊基于PhenoRob-F的設計思路和技術路線,針對作物不同角度、不同生育期株高差異和不同土壤條件下高通量表型檢測需求,設計了多類型表型機器人,包括:水田表型機器人、高度可調節的表型機器人,側視以及多視角成像機器人等,為作物育種相關科研提供新解決方案。
 圖5 不同應用場景下作物表型機器人
圖5 不同應用場景下作物表型機器人華中農業大學作物表型團隊聚焦作物全生命周期地上-地下、物理-生理、設施-大田、宏觀-微觀表型性狀獲取及解析關鍵技術突破、高通量表型系統研制及育種研究應用。本研究獲得國家重點研發計劃、國家自然科學基金等項目支持。
標簽:
作物表型




Copyright(C) 1998-2025 生物器材網 電話:021-64166852;13621656896 E-mail:info@bio-equip.com